GPS GNSSを用いた施工位置誘導システム
|
 |
| ● 従来工法 (杭芯誘導) |
杭の杭心への誘導はあらかじめ設置された杭心ピンを目視しながら、オペレータへ手動誘導されます。 |
| ● 従来手法課題 | クレーンオペと誘導者の少なくとも2名体制での作業であり、効率的ではありません。 また重機死角に誘導者が入ると誘導指示が見えないばかりか、危険作業となる可能性もあります。 地盤改良では多点の改良位置中心が存在し煩雑なのと、ラップ工法となるために中心精度が要求されます。 |
| ● 提案目的 | 本提案は、各杭工法における杭芯の誘導を重機オペ1名で実現することで、従来手法の課題を解決するものです。 また地盤改良のような多くの改良中心を都度測量することなく位置出しが可能なため、作業効率の向上と精度品質が向上します。 |
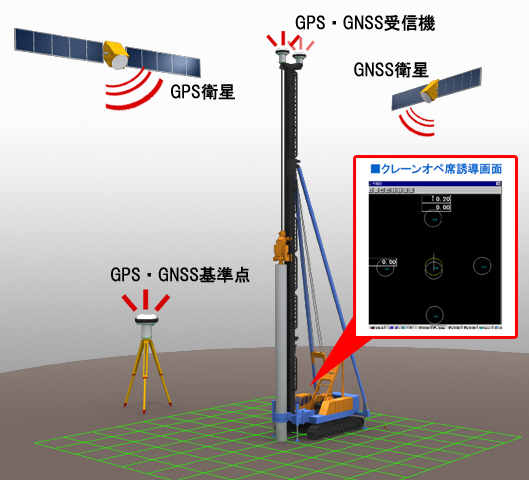
| ● 提案手法 |
杭打機・改良機のブームやリーダー上にGPS 受信機を設置、あらかじめ設置したGPS基準点と杭芯位置をGPSで測位し、施工機を誘導します。 あらかじめ入力されている各杭心(または 改良位置)座標に対し、目標の杭番号を指定することにより、目標位置への誘導をモニタ上に表示します。 |
|
対象工種(管理 誘導対象等 ) |
|
技術提案 |
|
≪特徴≫ |
測量作業なしで、杭・改良位置中心をリアルタイムに誘導可能。 オペレーターのワンマン作業が可能で、作業効率の向上と精度品質の向上が図れます。 |
|
|
|
≪効果≫ |
オペレーターが、モニタに表示される誘導(方向・距離)を見て重機を操作できます。 誘導者は不要で、またGPSの精度に基づき高精度に杭心を誘導できます。 |
||
| ●定量的表現 | 地盤改良の場合は多点の杭芯測量を省き、効率よく施工が可能となります。 また施工完了情報を入力することで出来高管理も可能となります。 |
||
| ●留意事項 |
GPSは山間部などの見通しが十分確保できない場合などは、設計仕様上の精度を確保出来ない場合があります。 |
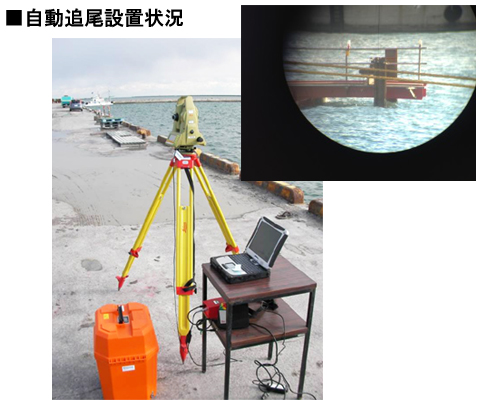
自動追尾型トータルステーションを用いた
|
|
| ● 従来工法 (杭芯誘導) |
杭・導材などの杭心誘導はトランシット・水糸、逃げなどにより行われます。 |
| ● 従来手法課題 | 非効率かつ精度の担保が難しく、また測量機の視準に測量担当者が必要などコストの低下も難しく、リアルタイム性も低く困難な作業でした。 |
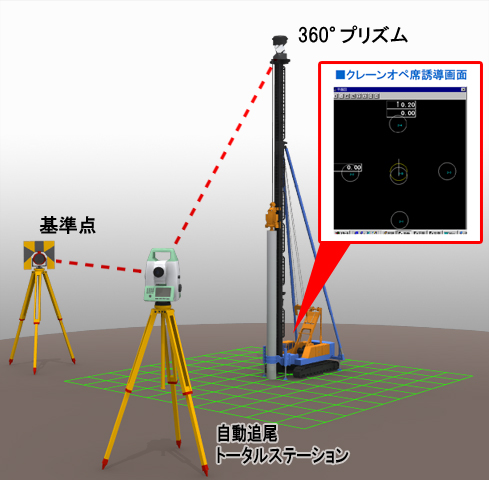
| ● 提案目的 | 本提案は自動追尾型トータルステーションによるプリズム追尾機能を用いて、測定対象物を設計位置へ誘導します。 |
| ● 提案手法 |
自動追尾型トータルステーションの場合は 、杭芯付近にオフセットされたプリズムを設置し、これを自動追尾することで、リアルタイムに座標測定が行われ杭芯との離隔を随時更新します。 |
|
対象工種(管理 誘導対象等 ) |
|
|
技術提案 |
|
|
≪特徴≫ |
離れた場所(海上や危険個所など)に設置する杭や導材などを、その場所に人が入らずとも芯出しが可能で、かつリアルタイムにガイダンスします。 |
 |
|
|
≪効果≫ |
杭や導材などはリモート観測が可能なため、測量作業を無人かつリアルタイムで実現可能です。 またGPS機能追加で移動体の自動追尾測量が可能になります。 |
||
| ●定量的表現 | 精度は、測角精度読みと測量距離に依存し、高精度測量機使用の場合は1mmオーダーで対応可能です。 | ||
| ●留意事項 |
施工前にプリズム設置位置、および測量視準線などの検討が必要となります。 |
  |
| クイモニ/GEOモニ/サイトポジショニングシステム |
| コンクリートバケット GPS誘導イメージ |